- Published on
Stanford’s ‘GentleHumanoid’ Teaches Robots to Hug, Shake Hands, and Handle Balloons

Humanoid robots are rapidly moving from stiff, programmed machines to agile systems that can mimic human motion. But a significant hurdle remains: most robots are dangerously rigid. They are trained to follow a path perfectly, and any unexpected contact—like bumping a table or interacting with a person—is treated as an error to be aggressively corrected.
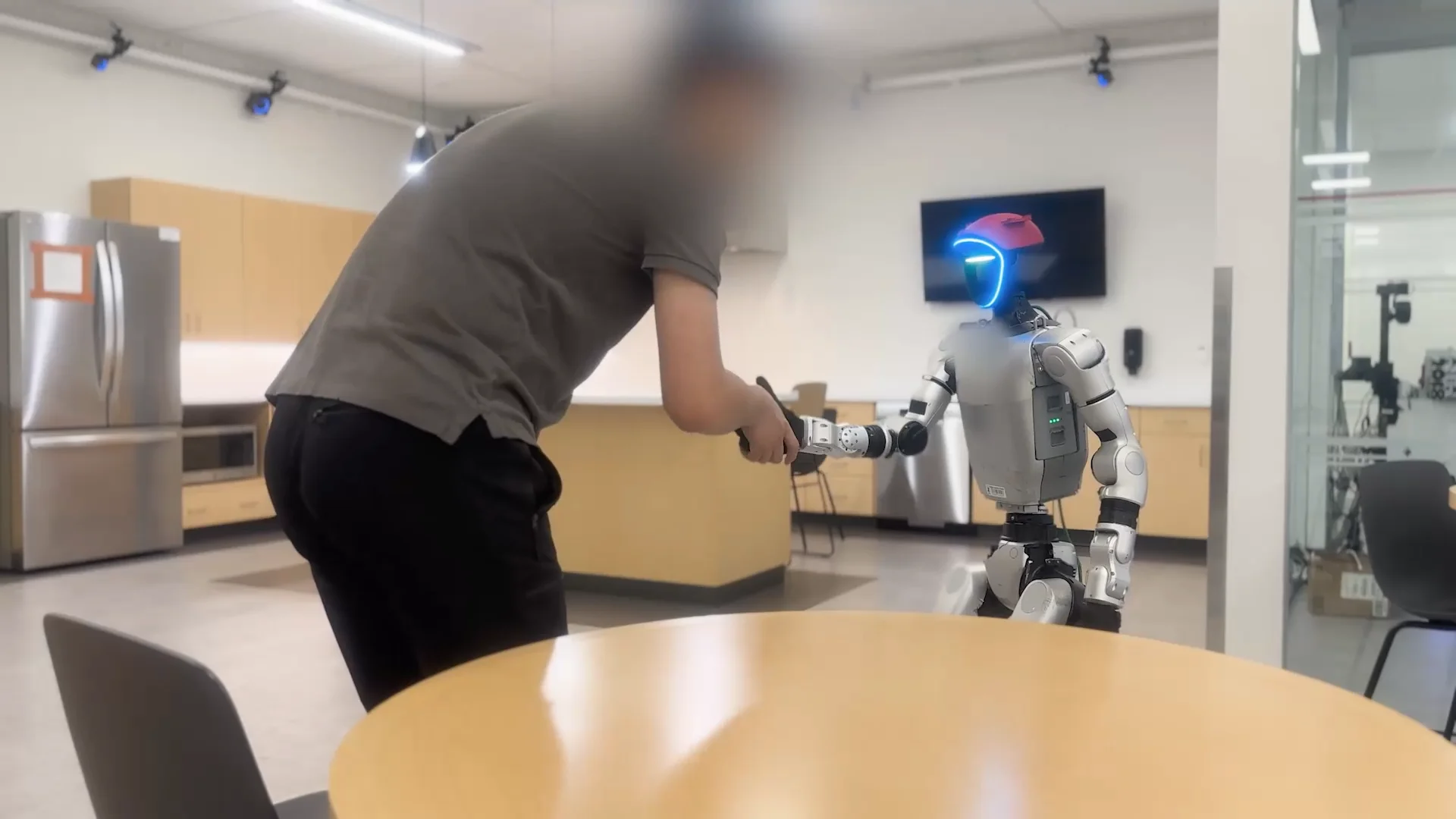
Now, researchers from Stanford University have introduced "Gentle Humanoid," a new control framework designed to solve this problem by teaching robots upper-body compliance . The system, demonstrated on a Unitree G1 humanoid, enables the robot to perform a range of contact-rich tasks safely, from gentle handshaking and balloon handling to autonomous, shape-aware hugging and providing sit-to-stand support .
The Move Toward 'Soft' Robots
The Stanford project joins a critical and growing trend in robotics focused on compliance. This challenge was highlighted just last month by MIT’s "SoftMimic" framework, which (as previously covered by Humanoids Daily) also aims to make robots "soft" and absorbent to unexpected forces rather than brittle .
Both research teams identified the same fundamental issue. Most modern reinforcement learning (RL) policies "emphasize rigid position or velocity tracking" and are trained to "suppress external forces" as disturbances . This leads to high, uncontrolled forces during contact, making any real-world human-robot interaction a risky proposition .
How GentleHumanoid Works
While SoftMimic tackled this by using a solver to create a massive augmented dataset of compliant reactions , GentleHumanoid introduces a different-but-related approach. At its core is a "unified spring-based formulation" that integrates impedance control directly into the whole-body motion-tracking policy .
This framework models two distinct types of contact:
- Resistive Contact: Forces generated when the robot presses against a surface, like holding an object .
- Guiding Contact: Forces applied by an external agent, like a human pushing or pulling the robot's arm .
Crucially, to learn "guiding" forces, the system is trained on interaction forces sampled from large-scale human motion datasets . This teaches the policy how to react to pushes and pulls in a way that is "kinematically consistent" across the entire upper body—coordinating the shoulder, elbow, and wrist—rather than just reacting stiffly at a single point of contact .
Safety You Can Tune
A key feature of the GentleHumanoid framework is its "task-adjustable force thresholds" . The policy is trained to be robust across a range of safety limits, allowing a user to "tune" the robot's compliance level at deployment .
The paper shows this in practice:
- Gentle Tasks: For handshaking or handling a fragile balloon, the limit can be set to a soft 5 Newtons (N) .
- Supportive Tasks: For providing firm sit-to-stand assistance, the limit can be set higher to offer stable support .
This adjustable safety is benchmarked against real-world comfort metrics, including ISO safety standards and even academic studies on the pressure of children's hugs .
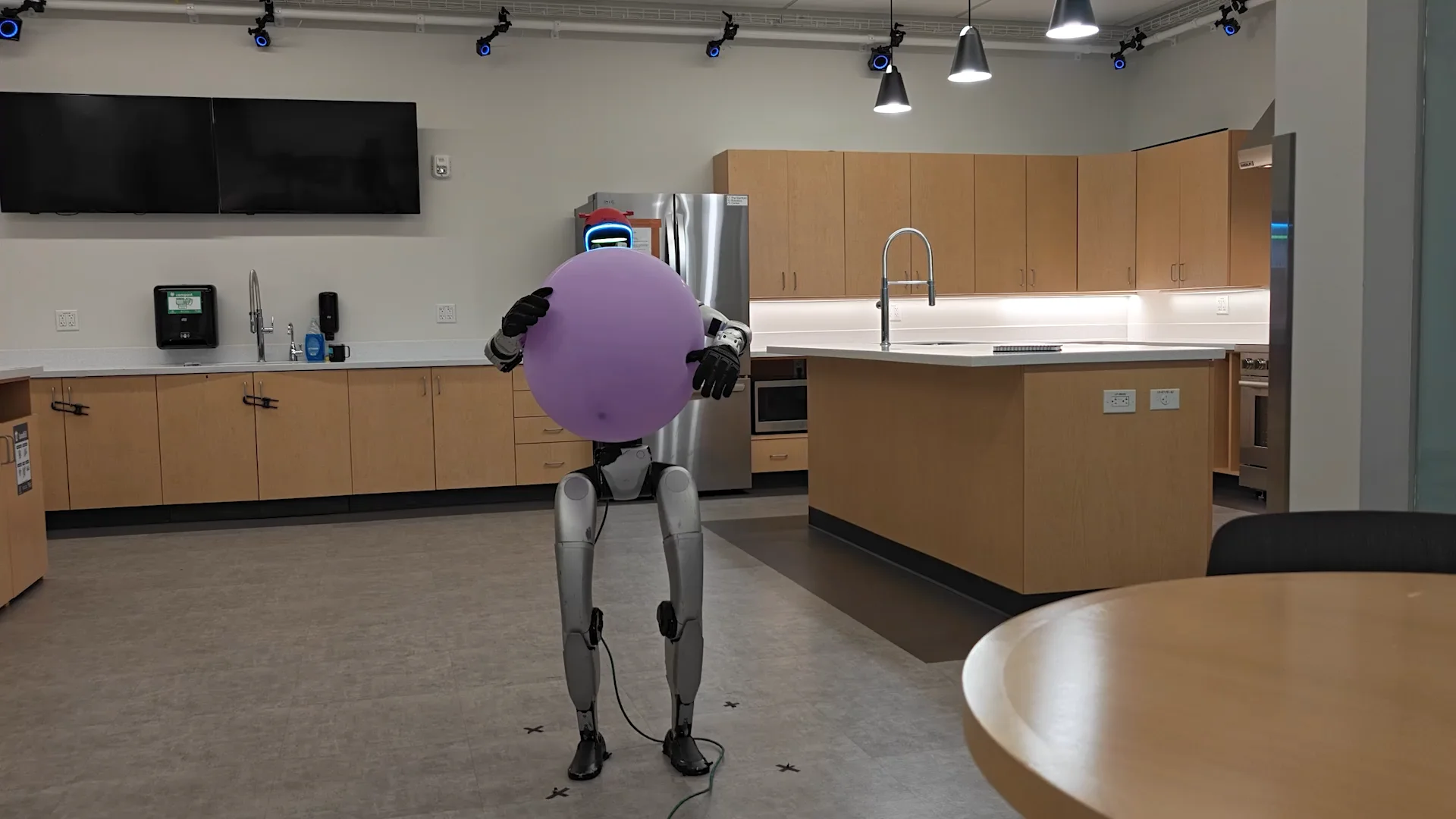
Passing the Balloon Test
In real-world experiments, the GentleHumanoid policy was compared against two baselines: a standard "Vanilla-RL" tracker and an "Extreme-RL" policy trained to resist end-effector forces .
The difference was stark. When handling a balloon, both baseline policies "apply excessive pressure, eventually squeezing the balloon until the G1 loses balance and drops it" . The GentleHumanoid policy, set to a 5 N limit, successfully held the balloon without damage .
In another test, the robot was tasked with autonomously hugging a person. By integrating camera input for human shape estimation, the policy could adapt its hugging motion for a "personalized body mesh" . The policy "consistently reduced peak contact forces" compared to the baselines, resulting in "smoother and more natural interactions" .
Limitations and Next Steps
The researchers acknowledge several limitations. The policy currently relies on simulated spring forces, which don't capture the full complexity of real-world contact, such as friction or the viscoelastic properties of human tissue .
The team also noted small "sim-to-real discrepancies," with the robot's real-world forces occasionally overshooting the desired threshold by 1-3 N . Furthermore, while the hugging pipeline is "autonomous," the critical step of localizing the human partner still relies on a motion-capture system, which the team hopes to replace with a fully vision-based pipeline in the future .
Even with these open questions, the work represents a significant step. Frameworks like GentleHumanoid and SoftMimic are moving the field beyond rigid imitation and toward robots that can "safely and effectively collaborate with humans" in the real world .
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.




