- Published on
Xpeng's Next-gen Iron Is Real: Follow-up Videos Settle Debate, Reveal New Hardware

The debate surrounding Xpeng's AI Day 2025 robot demonstration appears to be settled. After a 'human-like' stage walk sparked widespread online speculation that the demo was either a human in a suit or an older robot in disguise, Xpeng has released follow-up videos decisively proving the existence of its new hardware.
The new footage provides the first clear look at the next-generation 'Iron' robot's underlying structure, confirming it is a new mechanical platform.
Hardware Revealed, Speculation Ended
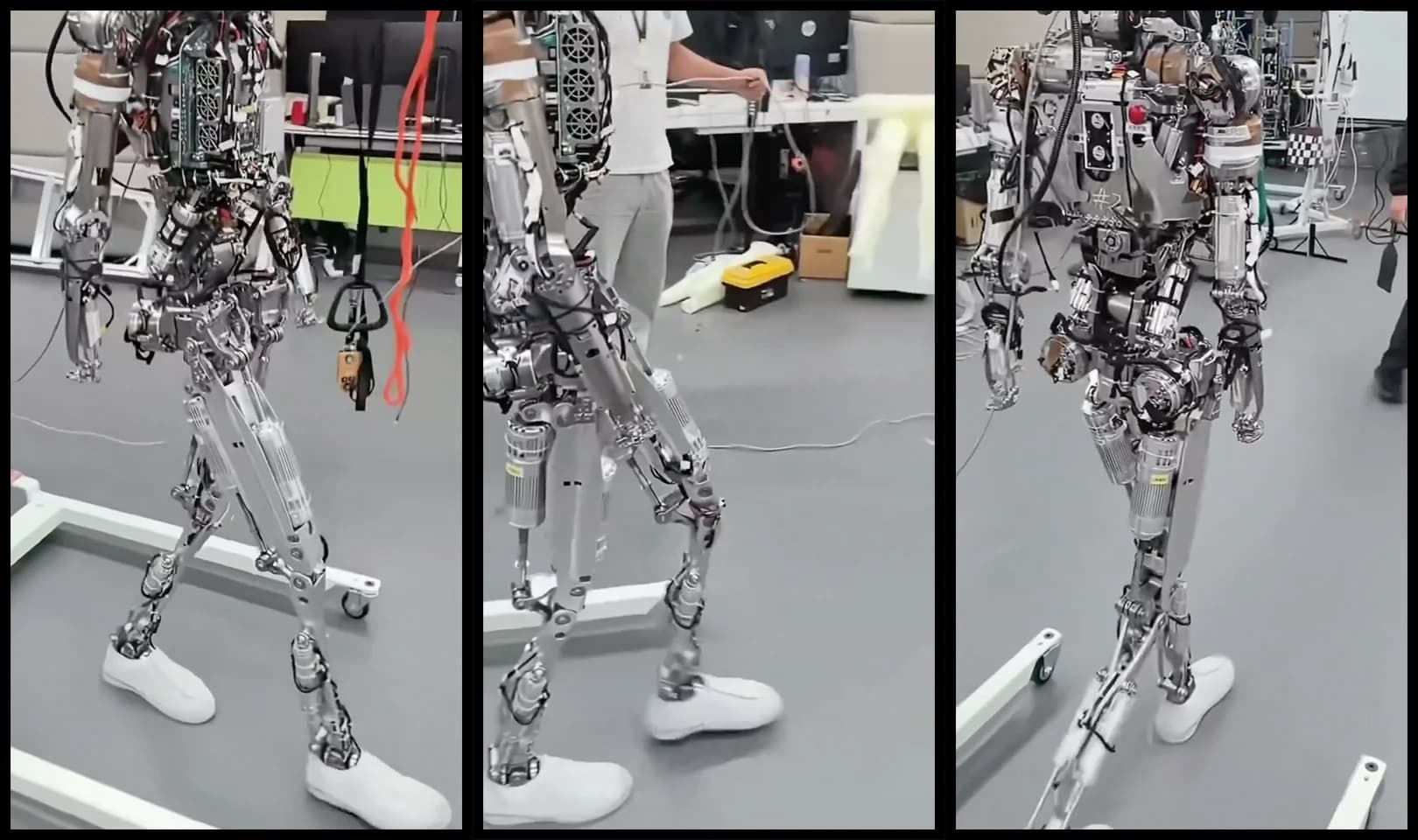
In a direct response to the online debate, Xpeng released new footage showing the robot in new contexts. One video shows the robot walking without its outer soft "skin" and clothing.
A second video shows Xpeng staff cutting away the white suit and foam padding from the robot's leg to expose the "skeleton" underneath. The robot then proceeds to walk with one leg's mechanical structure fully visible. This demonstration effectively ends any speculation that it was a human dressed up as a robot.
Analysis Points to New Hip and Knee Design
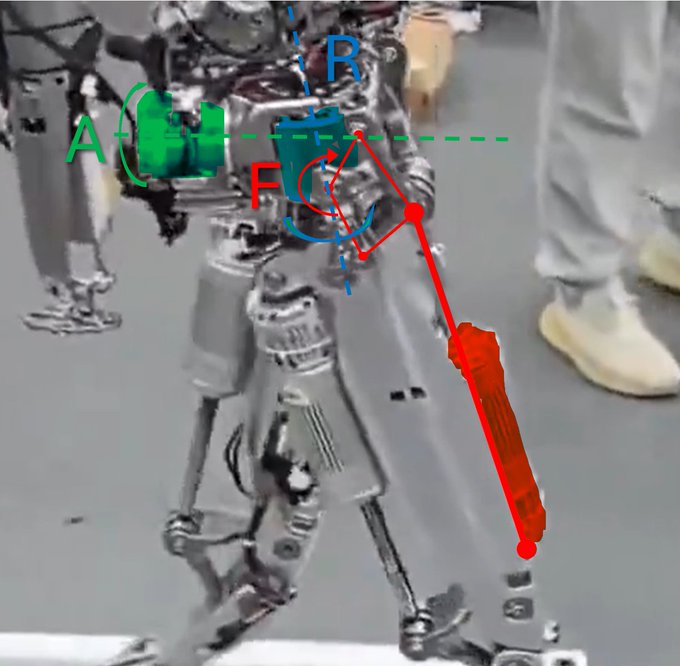
With the new hardware confirmed, analysts who had previously expressed skepticism are now detailing significant design changes from the previous 'Iron' generation. Scott Walter (@GoingBallistic5 on X), who had initially argued the stage demo was the older model, posted a new analysis based on the videos.
Key mechanical changes include:
- New Hip Configuration: Walter notes a significant shift in the hip's joint order. The original 'Iron' robot reportedly used an "R-AF" (Rotation-Abduction-Flexion) parallel design. The new Iron however, appears to use an "A-R-F" (Abduction-Rotation-Flexion) serial configuration. This A-R-F design is the same one notably retained by Tesla's Optimus.
- Relocated Knee Actuator: The demo's "convincing human-like knee caps" are now explained by a relocated actuator. According to Walter's analysis, the knee's 4-bar linkage (a "modified inverted Hoecken's Mechanism") now protrudes from the rear ("hamstring") rather than the front ("quadriceps") as on the original model.
- "Bionic Muscles" as Fascia: The keynote highlighted the robot's "bionic muscles". Walter speculates this is a compliant "fascia" layer between the skin and the mechanical actuators. This layer, he suggests, likely "aided the smooth locomotion" that first caused the online debate.
- Slimmer Profile: The new videos also confirm a slimmer silhouette, with "more lithe" ankles and a trimmer calf and shin than the previous generation.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.