- Published on
Confirmed: Unitree H2 Specs Reveal a 31-DOF Humanoid with a Major Hardware Overhaul

When Unitree first unveiled the H2, the "Destiny Awakening" video focused on fluid, kung-fu-like movements. While our initial report detailed the top-line spec upgrades, the engineering choices behind them remained partially obscured.
Now, with the robot on display at the Hangzhou Robotics Expo and with the official specification sheets published, a clearer picture has emerged. Analysis from robotics experts, combined with the new data, confirms the H2 is not just an iterative update but a fundamental re-architecture of Unitree's large humanoid platform, boasting a total of 31 degrees of freedom.

A New Core: 3-DOF Waist and F-A-R Hip
The most significant changes are in the robot's core. Official H2 specifications now confirm the robot features a 3-DOF waist, a crucial detail that enables more complex torso movement. This aligns with analysis from robotics expert Scott Walter, 'Humanoid Botangelist' on X, who identified the new design as a "compact Z-Y-X serial actuator stack". This serial design, which replaces the parallel mechanisms seen in some earlier models, is considered more robust, stable, and "RL friendly"—meaning it's easier to train with reinforcement learning algorithms.
This is paired with the adoption of the 'F-A-R' (Flexion-Abduction-Rotation) hip configuration, an industry trend for better packaging that standardizes the H2's design with Unitree's smaller G1 and R1 bots.
Lighter, Smarter Legs: Cable-Driven (?) Tendons
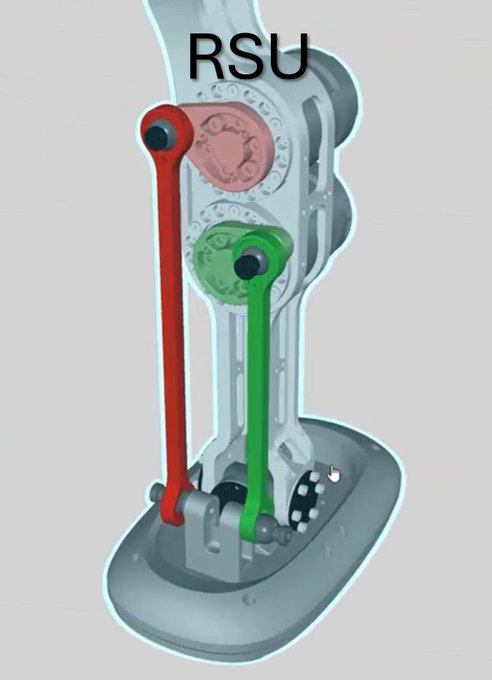
The H2's legs and feet also received a major overhaul, trading the H1's parallel actuated design for a novel "quasi-serial" system that prioritizes lower inertia.
Here’s the breakdown based on the new analysis:
- Tendon-driven Actuation: Cables, or more rigid rods, act as tendons, connecting remote motors to the joints. Close-up images from the expo suggest that Unitree is using steel cables.
- Inertia: This tendon-driven approach confirms the core design goal: moving the actuators for the ankle and knee high up the leg. By placing the heavy motors "just below the knee" and "just below the hip", the mass becomes "more proximal" (closer to the body's center).
- The "Why": This strategy significantly reduces the "reflected inertia" of the lower leg, making it lighter and far easier to control and move with speed and precision. This design helps explain the H2's fluid, dance-like motions and is considered more "sim2real friendly" (easier to simulate accurately).
Steel cables
A Head That Moves
Finally, one of the H2's key upgrades has been officially confirmed. While its predecessors had fixed heads, the new H2 specification sheet verifies it has an articulated neck with 2 degrees of freedom.
Reports from the expo floor and social media videos confirm the head can yaw (turn side-to-side) and pitch, a crucial upgrade for dynamic perception that allows the robot to track objects and its environment without turning its entire torso.
Taken together, these confirmed changes—a 3-DOF serial waist, remote-actuated ankles, and an articulated neck—paint a picture of a second-generation machine. Unitree has traded the H1's raw, speed-focused design for a platform that is more stable, dexterous, and built from the ground up to be more compatible with modern, simulation-based AI.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.