- Published on
Beyond the Kit: Asimov Details the 100-Hour Path to a Walking Humanoid

The barrier to entry for high-end bipedal robotics has long been defined by "black box" proprietary systems that are difficult to modify and even harder to repair. Following the recent launch of the Here Be Dragons edition, Asimov—an open-source project by Menlo Research—has released a deep-dive guide into the realities of building their v1 humanoid at home.

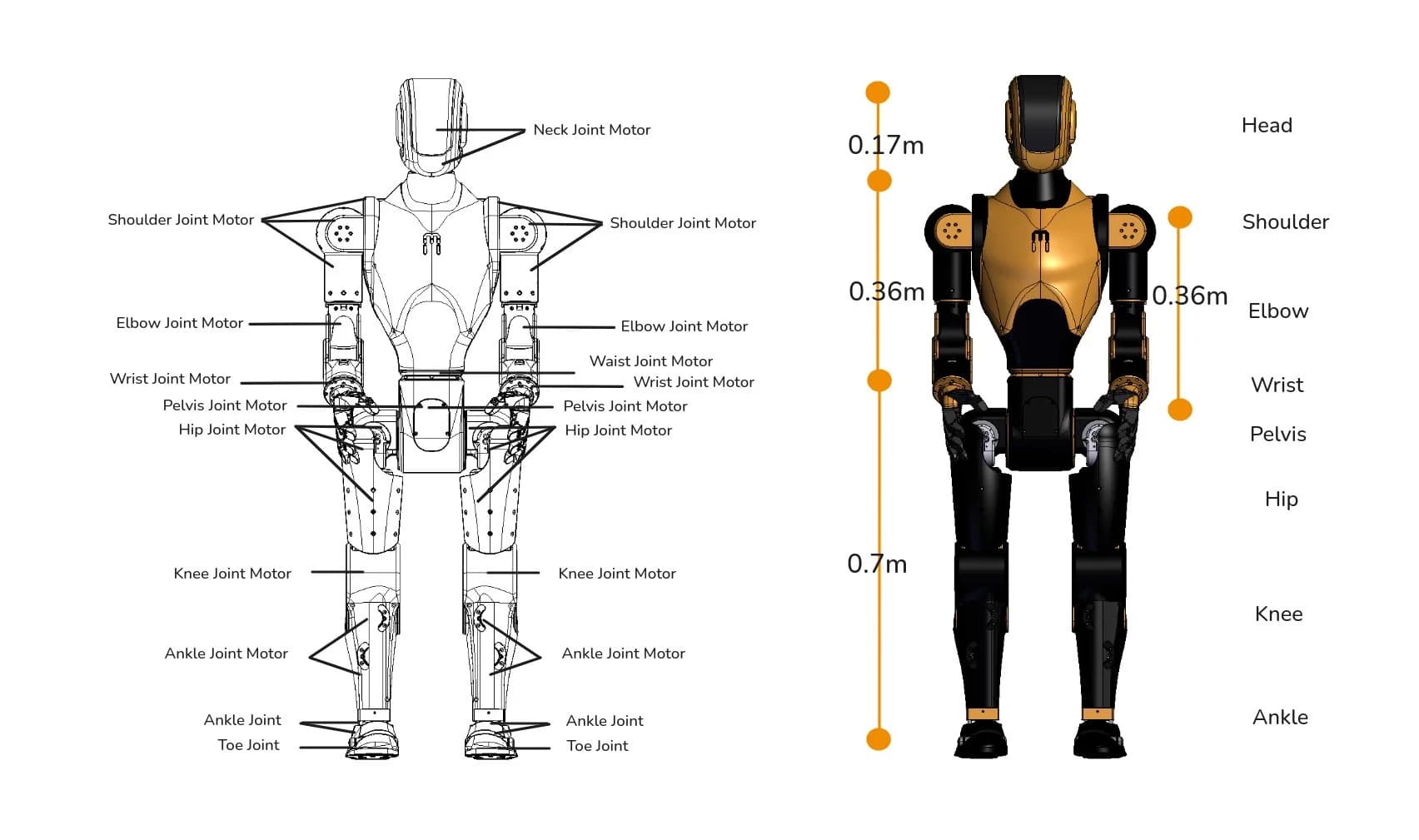
The project aims to solve what the team calls "rebuild friction" by providing a platform where every component is accessible, 3D-printable, or sourced off-the-shelf. However, the guide serves as a sobering reminder: building a 1.2-meter, 35kg humanoid is less of a weekend hobby and more of a complex engineering undertaking.
Tweet not found
The embedded tweet could not be found…
The 100-Hour Reality
Asimov estimates that a successful build requires between 50 to 100 hours. This timeline covers the transition from a box of parts to a "clean, safe, verifiable power-on," which the team identifies as the first critical milestone—not walking.
The complexity stems from the convergence of multiple systems:
- Mechanical Assembly: Torquing fasteners to spec and managing a non-standard parallel ankle mechanism.
- Electronics and Wiring: Managing CAN bus IDs and soldering connectors, a phase where most builders underestimate the time required for debugging signal issues.
- Software Integration: Configuring the control stack and validating the simulation path.
Mechanical Innovation: The RSU Ankle
The Asimov v1 features 25 actuated degrees of freedom (DoF) and two passive toe joints. A standout feature is the RSU (Revolute-Spherical-Universal) ankle mechanism.
Unlike traditional serial joints, this parallel design uses two 36 Nm motors to drive pitch and roll through a shared linkage. This architecture allows for better torque sharing and more natural responses to ground forces, though it adds a layer of complexity during the "Sim-to-Real" transfer, as the policy must account for kinematic remapping.
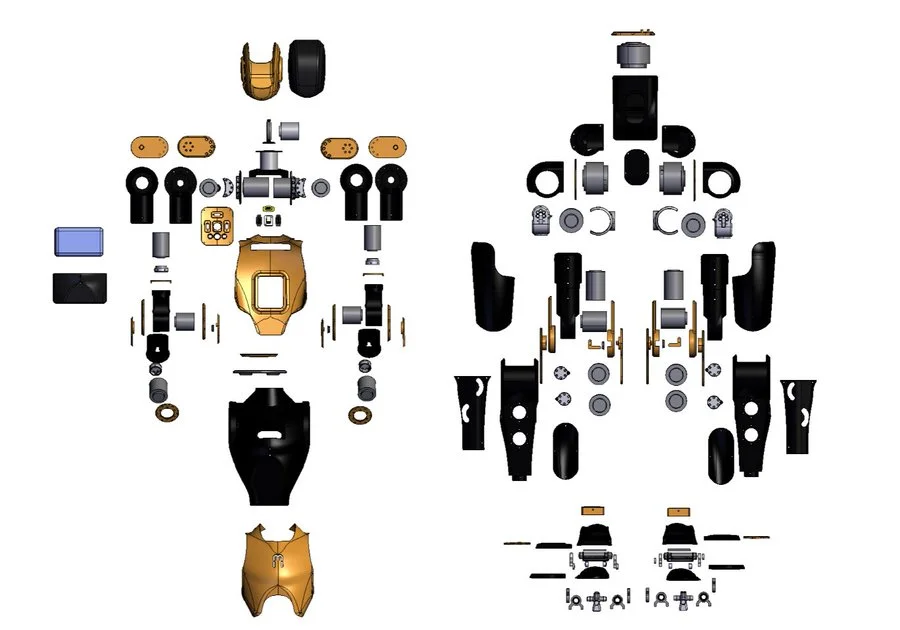
Structural integrity is maintained through a specific "ABCX" fabrication code. Load-bearing components (A-parts) are CNC machined from aluminum 7075, while non-structural elements (C-parts) are designed for Multi Jet Fusion (MJF) 3D printing. The team warns that standard FDM printing is insufficient for structural brackets, as material flex can corrupt the mechanical assumptions of the control stack.
Solving the "Sim-to-Real" Gap
A significant portion of the Asimov guide focuses on Processor-in-the-Loop (PIL) simulation. Rather than training in a mathematically "perfect" environment, Asimov intentionally injects reality-based artifacts into the simulator.
- Latency Modeling: The simulation emulates CANBus latencies of up to 9ms.
- Sensor Noise: Raw sensor noise is piped through an I2C emulator.
- Asymmetric Actor-Critic: The locomotion policy uses a training structure where the "critic" sees privileged ground-truth data (like exact foot height and contact forces), while the "actor"—the part that actually runs on the robot—only sees noisy, delayed sensor inputs.
This strategy ensures the robot does not become dependent on information it cannot actually measure on the hardware, such as ground-truth linear velocity.
The Economics of Open-Source Hardware
At a target price of $15,000, the "Here Be Dragons" kit is positioned as a mid-range entry point. While more expensive than the $8,999 K-Bot Founder’s Edition formerly offered by K-Scale Labs, Asimov’s strategy of selling closer to the bill-of-materials (BOM) cost is a calculated move.
By utilizing 3D-printable designs and avoiding high-volume tooling, Menlo Research is attempting to bypass the manufacturing traps that contributed to the recent collapse of K-Scale. Asimov joins projects like the ROBOTO ORIGIN in a growing movement to commoditize humanoid hardware, making it "operationally deployable and economically inevitable".
You can pre-order the Asimov DIY kit here.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.




