- Published on
Genesis AI Launches Genesis World 1.0, Turning the "Sim-to-Real" Gap into a Compute Problem

- Genesis AI has introduced Genesis World 1.0, a unified simulation platform designed to accelerate the development of robotics foundation models by solving the "evaluation bottleneck."
- The system compresses testing timelines dramatically; evaluations that traditionally take nearly a week of nonstop real-world robot testing can now run in approximately 30 minutes in simulation.
- The platform relies on a custom real-time path-traced renderer called Nyx and a cross-platform Python-to-GPU compiler named Quadrants to achieve massive parallelization.
- Unlike approaches that immediately jump to simulated training data, Genesis AI is currently using the platform strictly for closed-loop evaluation to systematically narrow the "sim-to-real" gap.
Data is widely considered the primary bottleneck in humanoid robotics, but a secondary, equally crippling hurdle is the slow pace of model evaluation in physical labs. Today, Genesis AI unveiled Genesis World 1.0, a next-generation simulation infrastructure built to transform that wall-clock limitation into a scalable compute problem.
The announcement serves as the digital counterpart to the company’s recent rapid-fire physical developments. Over the past month, the startup—which recently entered the commercial space backed by a $105 million seed round —has revealed its GENE-26.5 foundation model , confirmed proprietary hardware collaborations for the Genesis Hand 1.0 , and actively recruited operations and legal executives. Now, it is revealing the virtual proving ground where these systems will iterate.
Solving the Evaluation Bottleneck
While many robotics companies view simulation primarily as an endless fountain for synthetic training data, Genesis AI is initially positioning Genesis World 1.0 as a high-fidelity evaluation engine.
According to the company, running a statistically meaningful evaluation for a new model checkpoint across hundreds of tasks currently requires more than two hundred hours of continuous operation on physical hardware. By shifting this process into Genesis World 1.0, the same tens of thousands of episodes can be executed without human intervention in roughly 30 minutes, producing bit-exact, reproducible results.
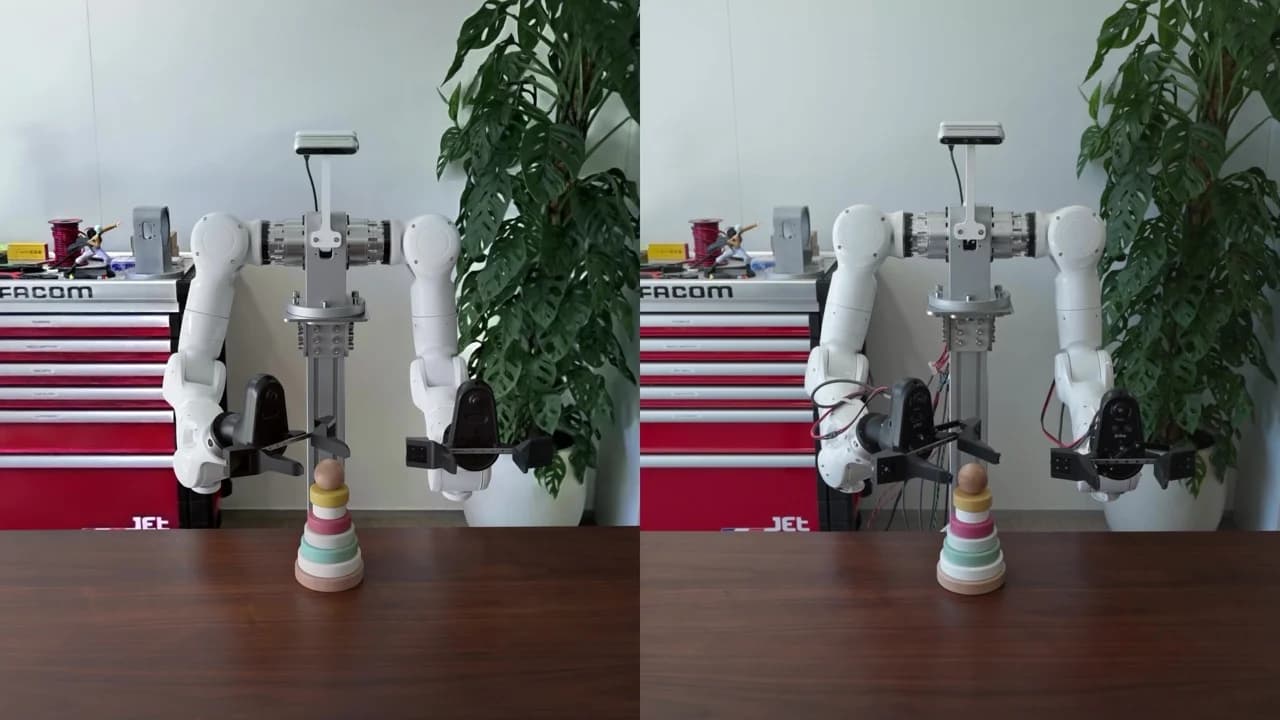
To ensure this speed doesn't come at the cost of accuracy, the company focused on "zero-shot real-to-sim" evaluation. Genesis keeps its training pipelines (which rely purely on real-world data) strictly separated from its evaluation pipelines. By isolating these streams, engineers can confidently determine if a performance spike is a true model improvement or just the AI overfitting to the quirks of the simulator.
This rigorous calibration appears to be paying off. Genesis AI claims its simulation evaluations correlate with on-hardware rollouts at 89%, boasting a reality gap that is 45% smaller than alternative platforms.
Under the Hood: Nyx and Quadrants
Achieving this level of physical and visual parity required a ground-up rebuild of the typical simulation stack. Off-the-shelf game engines often rely on visual tricks that confuse computer vision models, while scientific offline renderers are too slow for real-time robotic evaluation.
Genesis World 1.0 tackles this with several proprietary layers:
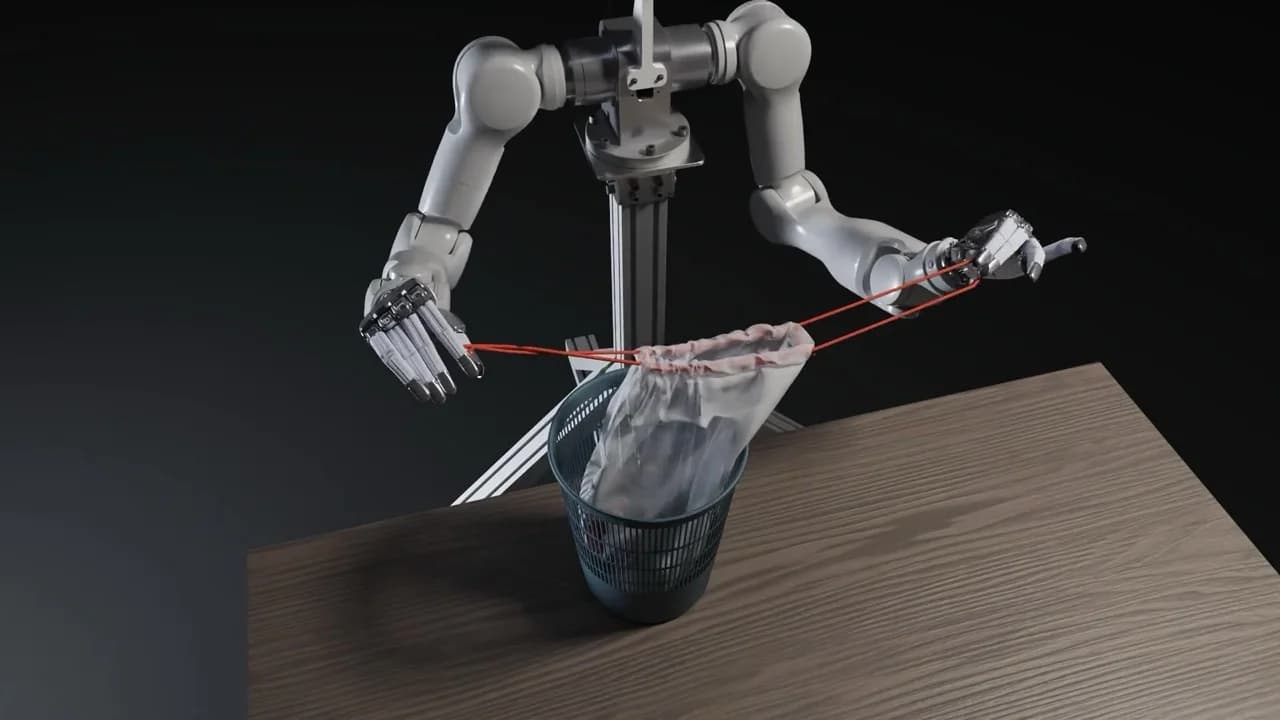
- Nyx: A purpose-built, real-time path-traced rendering engine. It handles complex multi-bounce lighting and soft shadows natively, rendering noise-free 1080p frames in 4 milliseconds or less. This ensures that the digital cameras feeding the AI's "eyes" capture exactly what physical sensors would see.
- Unified Physics: The simulator processes articulated rigid bodies alongside deformable materials, granular physics, and fluids in a single pipeline.
- Quadrants: A cross-platform compiler born from a fork of the Taichi programming language. It allows engineers to write physics kernels in plain Python and instantly compile them to run natively on highly parallelized GPU architectures (CUDA, Metal, Vulkan), slashing runtime latency.

The Path to "Self-Evolving" Physical AI
By drastically lowering the cost and time required to test a model, Genesis World 1.0 fundamentally changes the research cadence. Engineers can now systematically test how a robotic policy reacts to minute changes—such as alternative lighting, modified camera angles, or shifted object placements—across thousands of parallel scenarios before committing to massive, expensive GPU training runs.
Looking ahead, Genesis AI views this infrastructure as the precursor to what it calls "self-evolving physical AI." Once the sim-to-real gap is definitively closed, the platform will transition from being just an evaluation tool into a sandbox where AI agents can automatically generate new tasks, test themselves, fail safely, and improve their policies entirely in the digital realm.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.




