- Published on
The Contact Problem: How AGILINK’s New OmniHand 3 Ultra-M is Teaching Robots to Feel

- AGILINK premiered the OmniHand 3 Ultra-M at ICRA 2026, a 20-DOF, direct-drive dexterous hand designed for complex, unstructured manipulation tasks.
- The new flagship hand integrates vision-based tactile sensing into each fingertip, allowing the robot to capture micro deformations and slip behavior during contact interaction.
- At ICRA, AGILINK presented a broader series of dexterous manipulation demonstrations spanning tactile sensing, visual tracking, in-hand manipulation, and deformable object handling.
- This hardware launch follows AGILINK's recent milestone of surpassing a $1 billion valuation, solidifying its position as a dominant supplier in the embodied Al ecosystem.
- Addressing the robotics data bottleneck, AGILINK is developing internal Dex-UMI style frameworks and plans to share major updates on open-sourcing dexterous manipulation datasets by Q4.
Twisting a balloon into the shape of a dog is a delicate art. It requires continuous force adjustment, stable multi-point contact, coordinated finger motion, and real-time adaptation to the balloon's deformation. A slight miscalculation in pressure or a failure to detect a slip, and the balloon either unwinds or pops.
For a human, it is a fun party trick. For a roboticist, it represents one of the most demanding physical benchmarks in the industry: unstructured, contact-rich manipulation.
At the IEEE International Conference on Robotics and Automation (ICRA) in Vienna this week, AGILINK used that broader class of manipulation challenges as the backdrop for a series of live demonstrations spanning tactile perception, visual tracking, in-hand manipulation, and deformable object control.
Each demonstration isolated a different failure mode of contact-rich manipulation perception uncertainty, slip regulation, deformable interaction, or in-hand stabilization.
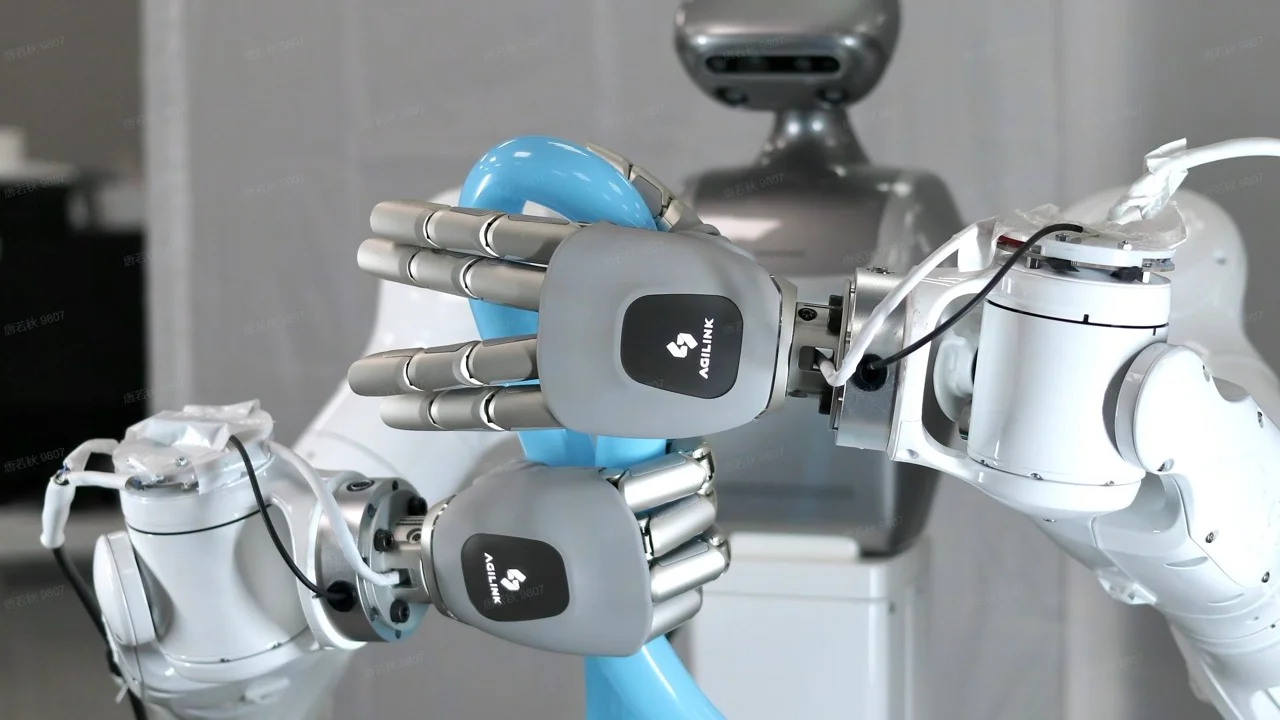
The showcase also marked the debut of the OmniHand 3 Ultra-M, AGILINK's new flagship direct-drive dexterous hand platform designed for dense-contact interaction research.
Alongside the Ultra-M demonstrations, AGILINK also presented tendon-driven and lightweight manipulation systems, reflecting the company's broader exploration of multiple hardware architectures for embodied manipulation.
Across the showcase, AGILINK repeatedly returned to one underlying idea: the next frontier of dexterous robotics may not be motion generation itself, but interaction stability under continuously changing contact conditions.
We sat down with AGILINK's CTO Kun Xiong to discuss the Ultra-M's development, the ongoing debate between direct-drive and tendon-driven architectures, and why solving the "contact problem" is the key to deploying robots into the human world.

Engineering for the Real World
The OmniHand 3 Ultra-M marks a significant milestone for AGILINK, completing a dual-flagship strategy alongside its tendon-driven counterpart, the Ultra-T. The Ultra-M packs 20 active degrees of freedom into a direct-drive architecture, weighing just 630 grams while closely matching the dimensions of an adult human hand.
"For AGILINK, the Ultra-M is an important milestone because it represents our latest understanding of what high-end dexterous manipulation systems need in order to operate effectively in real world environments," Kun Xiong explained. "We designed the Ultra-M specifically for complex manipulation and dense contact interaction scenarios, where robots need not only dexterity, but also stable perception, precise force control, and highly human-like operation capability."
Across the demonstrations, a recurring technical theme emerged: maintaining interaction stability under changing contact conditions.
Whether rotating a ball within the palm using the tendon-driven Ultra-T, tracking object motion visually with the Ultra-M, or manipulating deformable materials such as balloons, the core challenge is not simply generating motion, but continuously regulating contact as the state of the environment evolves in real time.
This capability is crucial for scaling robots out of the lab and into commercial environments. Many real-world humanoid tasks are fundamentally contact-rich-such as cable insertion, garment handling, flexible packaging, and connector mating. These tasks often fail not because the robot cannot reach the correct position, but because contact itself becomes unstable during manipulation.
To solve this, the direct-drive architecture of the Ultra-M is engineered specifically to accelerate embodied Al training through a unique learning strategy. Instead of learning only fixed motion trajectories, the system is trained through human demonstrations focused on interaction stability, with policies further refined via reinforcement learning in simulation and fine-tuned on real hardware.
"For embodied Al training and dexterous manipulation algorithm development, direct-drive architectures are often more friendly in terms of controllability, sensing transparency, response behavior, and engineering consistency," Kun Xiong noted. "Over the next three to five years, direct-drive dexterous hands will likely continue playing an important role in advanced embodied manipulation research."

This debate over direct-drive versus tendon-driven actuation is currently one of the most stark divisions among major players in the humanoid robotics industry. Prominent pioneers have taken diametrically opposed tracks: Figure CEO Brett Adcock has publicly stated that his team shifted entirely away from tendons after concluding it was a mechanical dead end, focusing instead on the high-precision control of direct-drive motors. Conversely, Elon Musk has doubled down on a complex, highly anthropomorphic tendon architecture for Tesla's next-generation Optimus hand, betting on its potential for human-scale flexibility.
AGILINK, however, is leveraging its massive manufacturing footprint to straddle this industry divide rather than picking a side.
"At the same time, we also believe tendon-driven systems will continue evolving rapidly," Kun Xiong emphasized. "As key challenges such as tendon creep, maintenance, and tendon replacement are gradually solved, tendon-driven hands will become increasingly capable across broader classes of manipulation tasks.. So rather than viewing the two architectures as competitors, we see them as complementary technical paths that will continue pushing each other forward."
Solving the Perception Gap: Perceiving Through Touch
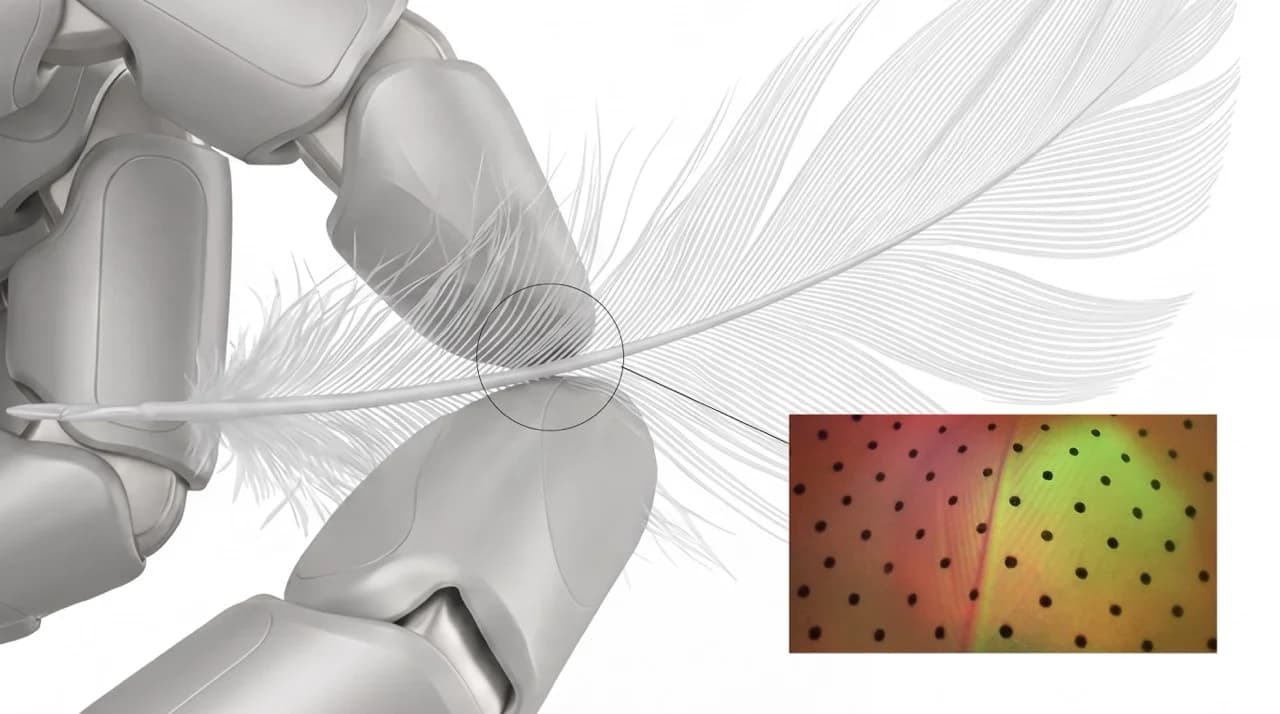
One of the most groundbreaking features of the Ultra-M is its perception stack. The hand features large-area 3D tactile perception across the palm, while its most critical sensing capability lies in the fingertips.
Each fingertip incorporates a compact vision-based tactile sensing module capable of capturing contact geometry, pressure distribution, micro-deformation, and slip dynamics in real time during manipulation. The sensor resolves contact forces down to approximately 0.005 N in the normal direction, with a spatial resolution near 0.04 mm and a sensing density of roughly 50,000 points per cm².
Traditional teleoperation is often a "blind" process, where human operators rely on external cameras and raw intuition.
"What changes with OmniHand 3 Ultra-M is that the fingertips can now directly sense how contact evolves during interaction," CTO Kun Xiong detailed. "This is important because many real-world manipulation failures do not come from incorrect motion planning. They come from poor contact understanding. With vision-based tactile sensing, those previously hidden dynamics become observable and learnable."
By capturing the actual evolution of contact-rather than just the motion trajectory-the Ultra-M enables a much richer dataset.
"Instead of learning only 'how the hand moved,' the robot can begin learning 'why the interaction remained stable,'" Xiong added. "The industry has spent years improving motion control, but real-world manipulation is fundamentally a contact problem. To achieve human level dexterity, robots must not only move precisely - they must understand touch itself."

The Fermi Paradox and Deployment Year One
Building a robotic hand that is both highly dexterous and industrially robust has long been constrained by what many in the industry describe as an "impossible triangle" dexterity, reliability, and cost. Improving one often comes at the expense of the others.
AGILINK, however, approaches this challenge through the lens of mass deployment. Having already shipped over 8,000 hands and 10,000 grippers to customers, the company leverages extensive real-world feedback to harden its designs.
"The challenge is not whether high dexterity, reliability, and scalable manufacturing can coexist, the real challenge is accumulating enough real-world engineering experience to balance the tradeoffs correctly for specific applications," AGILINK argued. "Reliability is usually the result of thousands of small engineering decisions across the entire product lifecycle - not just one strong mechanical component."

This focus on deployment aligns closely with parent company AGIBOT's declaration of 2026 as "Deployment Year One," signaling an industry shift from laboratory demonstrations to practical utility.
To further accelerate this transition, AGILINK is using its recent capital injection to address the industry's critical data bottleneck. The company confirmed it is developing its own native Dex-UMI style framework to facilitate data collection and expects to share meaningful progress on open-sourcing dexterous manipulation datasets in Q4.
"We believe embodied Al cannot advance through isolated companies working independently behind closed doors," Xiong noted. "As the quality and diversity of manipulation data improve, model generalization improves. As generalization improves, deployment barriers decrease. And as deployment scales, even more real-world data becomes available."
Ultimately, the true test of this deployment era will be physical interaction. As AGILINK'S ICRA showcase suggests, the next challenge in robotics may not be teaching robots how to move, but how to maintain stable contact with a world that refuses to stay still.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.




