- Published on
Reality Check at ICRA: AGIBOT World Challenge Shifts Embodied AI from Simulation to Physical Hardware

- The AGIBOT World Challenge 2026 at ICRA in Vienna brought together 526 teams from 27 countries to validate embodied AI models under real-world constraints.
- The competition emphasized closed-loop real-robot testing, moving beyond isolated simulation metrics to focus on physical adaptability and long-horizon task reliability.
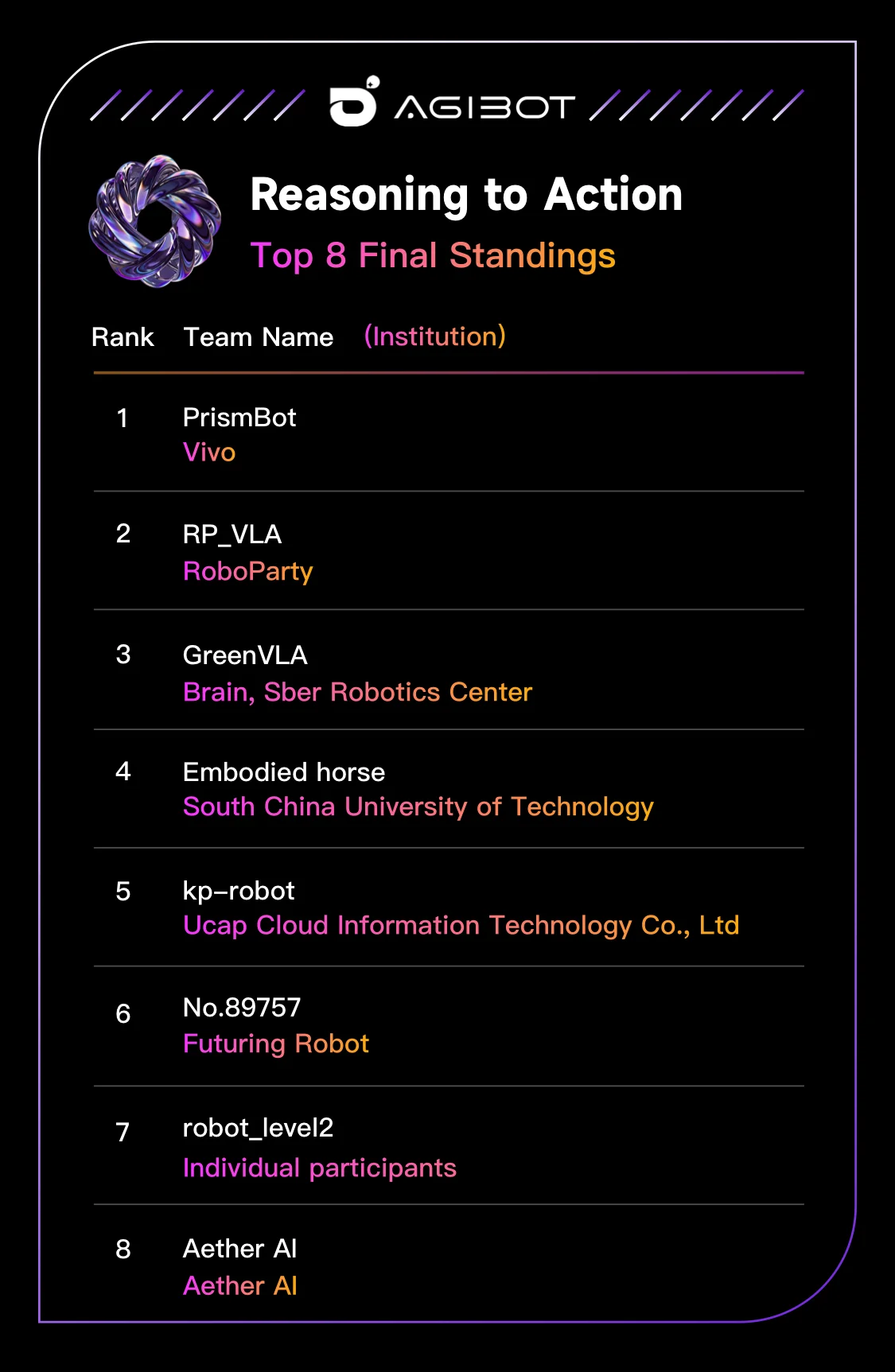
- In the updated Reasoning to Action (R2A) track, team PrismBot from vivo took first place by training models using AGIBOT’s open-source dataset and Genie Sim 3.0.
- The World Model (WM) track evaluated how systems predict physical changes, incorporating non-ideal interactions like object drops and grasping failures.
VIENNA, Austria — The gap between simulated perfection and real-world messiness has long been the primary headache for robotics researchers. While an AI agent can achieve a flawless success rate in a digital sandbox, transitioning those algorithms to physical hardware often reveals a stark "sim-to-real" penalty.
At the 2026 IEEE International Conference on Robotics and Automation (ICRA) in Vienna, Chinese embodied AI developer AGIBOT sought to confront this hurdle head-on. The company hosted the AGIBOT World Challenge 2026, an intensive competition designed to push machine learning models out of virtual environments and onto actual physical hardware. The event drew 526 research and corporate teams spanning 27 countries, highlighting an industry-wide pivot toward standardized, physical validation.

Dual Tracks: Bridging Action and Prediction
The challenge was structured around two distinct operational tracks: Reasoning to Action (R2A) and World Model (WM), mapping to the core computational pillars required for physical autonomy.
The Reasoning to Action (R2A) track—an evolution of the 2025 Manipulation track—widened its scope from simple mechanical execution to the entire pipeline of scene understanding, task planning, and physical execution. Teams were tasked with training reasoning-and-manipulation models using the AGIBOT WORLD open-source dataset and verifying them virtually via Genie Sim 3.0. The evaluation pushed beyond scripted tasks to test language understanding, spatial reasoning, atomic skill composition, and zero-shot adaptation to external disturbances.
Ultimately, team PrismBot from vivo claimed the championship and a $10,000 grand prize with 43.47 points, followed closely by Shanghai RoboParty's RP-VLA (35.66 points) and Russia's Sber Robotics Center team, GreenVLA (33.19 points).
Concurrently, the World Model (WM) track focused on prediction. Instead of executing motor commands, systems were evaluated on their ability to anticipate changes in the physical environment based on sensor inputs and potential robot movements. To mirror the unpredictability of actual deployment, the track deliberately incorporated non-ideal physical interactions, such as object drops and grasping failures. NeoVerse-ABot—a collaborative team from the Institute of Automation of the Chinese Academy of Sciences and Amap CV Lab—took first place, demonstrating superior forecasting accuracy in complex physical environments.
The Supermarket Benchmark: Testing Whole-Body Control
A major highlight of the physical finals in Vienna was a specialized supermarket benchmark track launched in tandem with Dexmal. Staged within a highly realistic retail environment, the track required end-to-end mobile manipulation under strict physical constraints, including varying shelf heights and randomized object placements.

Rather than relying on isolated pre-programmed scripts, final teams utilized API-based remote control to guide real robots through autonomous navigation, product picking, and item transport. This format forced algorithms to coordinate the robot's entire physical frame—balancing locomotion with dual-arm manipulation—to complete long-horizon tasks successfully.
Standardizing the Toolchain for Deployability
The competition serves as a practical showcase for AGIBOT's broader software and hardware ecosystem, which the company has been aggressively scaling following its declaration of 2026 as "Deployment Year One". Finalists deployed their models directly onto the AGIBOT G2 wheeled humanoid platform, making physical stability and environmental robustness a central factor in the final scoring.
By utilizing standardized benchmarks like EWMBench—which was originally designed to evaluate action-conditioned world simulators—the challenge offered a unified, reproducible framework for measuring performance across both digital twins and real-world settings. Over 100 competing teams managed to surpass the official baseline, pointing to an increasing maturity in how academic labs and corporate teams approach embodied AI.

Looking ahead, AGIBOT plans to translate the infrastructure built for the competition into an ongoing open-source ecosystem, including an online simulation leaderboard and expanded quantitative evaluation benchmarks. For an industry often prone to sensationalized video demonstrations, moving toward rigorous, closed-loop public testing is a necessary step if humanoids are ever to graduate from the exhibition floor to actual, scalable commercial deployment.
Comments
No comments yet. Be the first to share your thoughts!
Share this article
Stay Ahead in Humanoid Robotics
Get the latest developments, breakthroughs, and insights in humanoid robotics — delivered straight to your inbox.




